

Setting up the spear
When creating the spear fixtures and bodies it's important to make it as symmetrical and balanced as possible. I used a diamond shape for the spear head to make sure it was a little bit more front heavy. This will ensure it flies through the air nice and straight (see Fig 1 to see how it compares to the sprite image for the spear)

Fig 1: This shows the spear sprite and the Box2D body definition
float halfWidth = (sprite.getWidth()/2 / PIXELS_TO_METERS);
float halfHeight = (sprite.getHeight()/2 / PIXELS_TO_METERS);
BodyDef bodyDefSpearShaft = new BodyDef();
bodyDefSpearShaft.type = BodyDef.BodyType.DynamicBody;
bodyDefSpearShaft.position.set(position.x,position.y);
bodyDefSpearShaft.angle=(float) Math.toRadians(0);
bodySpearShaft = world.createBody(bodyDefSpearShaft);
bodySpearShaft.setUserData(new BodyUserData(0,"SpearShaftBody"));
BodyDef bodyDefSpearHead = new BodyDef();
bodyDefSpearHead.type = BodyDef.BodyType.DynamicBody;
bodyDefSpearHead.position.set(position.x,position.y);
bodyDefSpearHead.angle=(float) Math.toRadians(0);
bodySpearHead = world.createBody(bodyDefSpearHead);
bodySpearHead.setUserData(new BodyUserData(0,"SpearHeadBody"));
//shaft fixture
PolygonShape shapeShaft = new PolygonShape();
Vector2[] verticesShaft = new Vector2[4];
verticesShaft[0] = new Vector2(halfWidth-0.9f, halfHeight-0.07f);
verticesShaft[1] = new Vector2(halfWidth-0.9f, -halfHeight+0.07f);
verticesShaft[2] = new Vector2(-halfWidth, -halfHeight+0.07f);
verticesShaft[3] = new Vector2(-halfWidth, halfHeight-0.07f);
shapeShaft.set(verticesShaft);
FixtureDef fixtureDefShaft = new FixtureDef();
fixtureDefShaft.shape = shapeShaft;
fixtureDefShaft.density = 0.1f;
fixtureDefShaft.friction = 0.0f;
fixtureDefShaft.restitution = 0.0f;
//spear head fixture
PolygonShape shapeSpearHead = new PolygonShape();
Vector2[] vertices = new Vector2[4];
vertices[0] = new Vector2(0.5f, 0.0f);
vertices[1] = new Vector2(halfWidth-0.5f, -0.1f);
vertices[2] = new Vector2(halfWidth-0.0f, 0.0f);
vertices[3] = new Vector2(halfWidth-0.5f, 0.1f);
shapeSpearHead.set(vertices);
FixtureDef fixtureDefSpearHead = new FixtureDef();
fixtureDefSpearHead.shape = shapeSpearHead;
fixtureDefSpearHead.density = 0.1f;
fixtureDefSpearHead.friction = 0.0f;
fixtureDefSpearHead.restitution = 0.0f;
bodySpearShaft.createFixture(fixtureDefShaft);
bodySpearHead.createFixture(fixtureDefSpearHead);
//dispose shapes
shapeShaft.dispose();
shapeSpearHead.dispose();
If you look at the code above, you can see I used two fixtures and two separate bodies respectively. You don't necessarily need to do it this way and could probably just add both fixtures to one body but I did it this way because I want only the spear head fixture to be made "sticky" during collision detection. You wouldn't want the spear shaft to stick to the fish when it hits, right? So I also set some userdata to a class I made to hold different things for use during collision detection which will make sense later. But seeing as I have chosen to use two separate bodies I need to weld those bodies together to form the whole spear. See code below for a simple weld joint.
CODE: BodyUserData class
public class BodyUserData {
String name;
int uniqueID;
public BodyUserData(int uniqueID, String name) {
this.name=name;
this.uniqueID=uniqueID;
}
}
//weld the spear head to the shaft WeldJointDef weldJointDef = new WeldJointDef(); weldJointDef.bodyA = bodySpearHead; weldJointDef.bodyB = bodySpearShaft; weldJointDef.type = JointType.WeldJoint; weldJointDef.collideConnected = true; weldJointDef.frequencyHz=0; weldJointDef.dampingRatio=0; Vector2 weldpoint = bodySpearHead.getWorldCenter(); weldJointDef.initialize(weldJointDef.bodyB,weldJointDef.bodyA, weldpoint); world.createJoint(weldJointDef);
Now that we've got a the spear created we will create motorized revolute joint. I decided to create another body for the axel and put the revolute joint on that and weld the axel body to the shaft. This joint rotates by enabling the motor (see Fig 2 to see how it rotates).
Fig 2: spear rotating on a motorized revolute joint
//create revolute joint (motorized axel) and attach it to the spearshaft and motorize it
BodyDef rotationAxelBodyDef = new BodyDef();
rotationAxelBodyDef.type = BodyDef.BodyType.StaticBody;
rotationAxelBodyDef.position.set(position.x,position.y);
rotationAxelBodyDef.angle=(float) Math.toRadians(10);
bodyRotationAxel = world.createBody(rotationAxelBodyDef);
bodyRotationAxel.setUserData("RotationAxelBody");
RevoluteJointDef weldJointDef2 = new RevoluteJointDef();
weldJointDef2.bodyA = bodyRotationAxel;
weldJointDef2.bodyB = bodySpearShaft;
weldJointDef2.type = JointType.RevoluteJoint;
weldJointDef2.collideConnected = true;
weldJointDef2.enableMotor = true;
weldJointDef2.maxMotorTorque = 200;
weldJointDef2.motorSpeed = (float)Math.toRadians(motorSpeed);
Vector2 weldpoint2 = bodyRotationAxel.getWorldCenter();
weldJointDef2.initialize(weldJointDef2.bodyB,weldJointDef2.bodyA, weldpoint2);
motorJoint = (RevoluteJoint) world.createJoint(weldJointDef2);
When the angle of the spear reaches a certain point in either direction I toggle the motor direction
CODE: changing motor direction
if (Math.toDegrees(bodySpearShaft.getAngle())< =-145 && !spearLaunched){
motorJoint.setMotorSpeed((float)Math.toRadians(-motorSpeed));
}else if (Math.toDegrees(bodySpearShaft.getAngle())>=-35 && !spearLaunched){
motorJoint.setMotorSpeed((float)Math.toRadians(motorSpeed));
}
Setting up the fish
It's also important to make the fish somewhat symmetrical and give it enough weight so that when the spear hits it we don't have it spin erratically out of control. (see Fig 3 to see how it compares to the sprite image for the fish)

Fig 3: This shows the fish sprite and the Box2D body definition
Fig 3: Spear colliding with fish and sticking
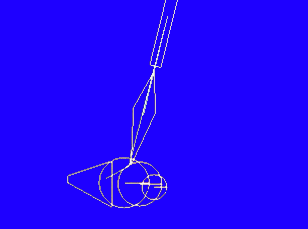
Fig 4: Shows the weld joint between the fish and spear